
人手不足やコスト上昇など2024年問題に直面している物流業界において、テクノロジーの導入による自動化や効率化は待ったなしの課題となっています。
IHIでは物流倉庫での省人化に寄与すべく、ロボットのOT(Operational Technology=制御技術)の開発を3つのプロジェクトで進めています。一つは「AMR(Autonomous Mobile Robot=自律走行ロボット)」。倉庫内で荷物を運ぶ際、現在主流のコンベアと違って経路を柔軟に変更でき、多様な荷物に対応可能です。
もう一つは群制御技術。AMRやそれに荷物を積み込むロボットアームなど、倉庫内では多種多様な、しかもさまざまなメーカー製のロボットがそれぞれの制御システム上で動いています。これらを一つのシステムで制御する試みをしています。
AMRや群制御の技術開発の取組に関する記事はこちらからご覧ください(外部リンク)
(実際の製品とは異なります)

(提供:ROS-Industrial Consortium AP)
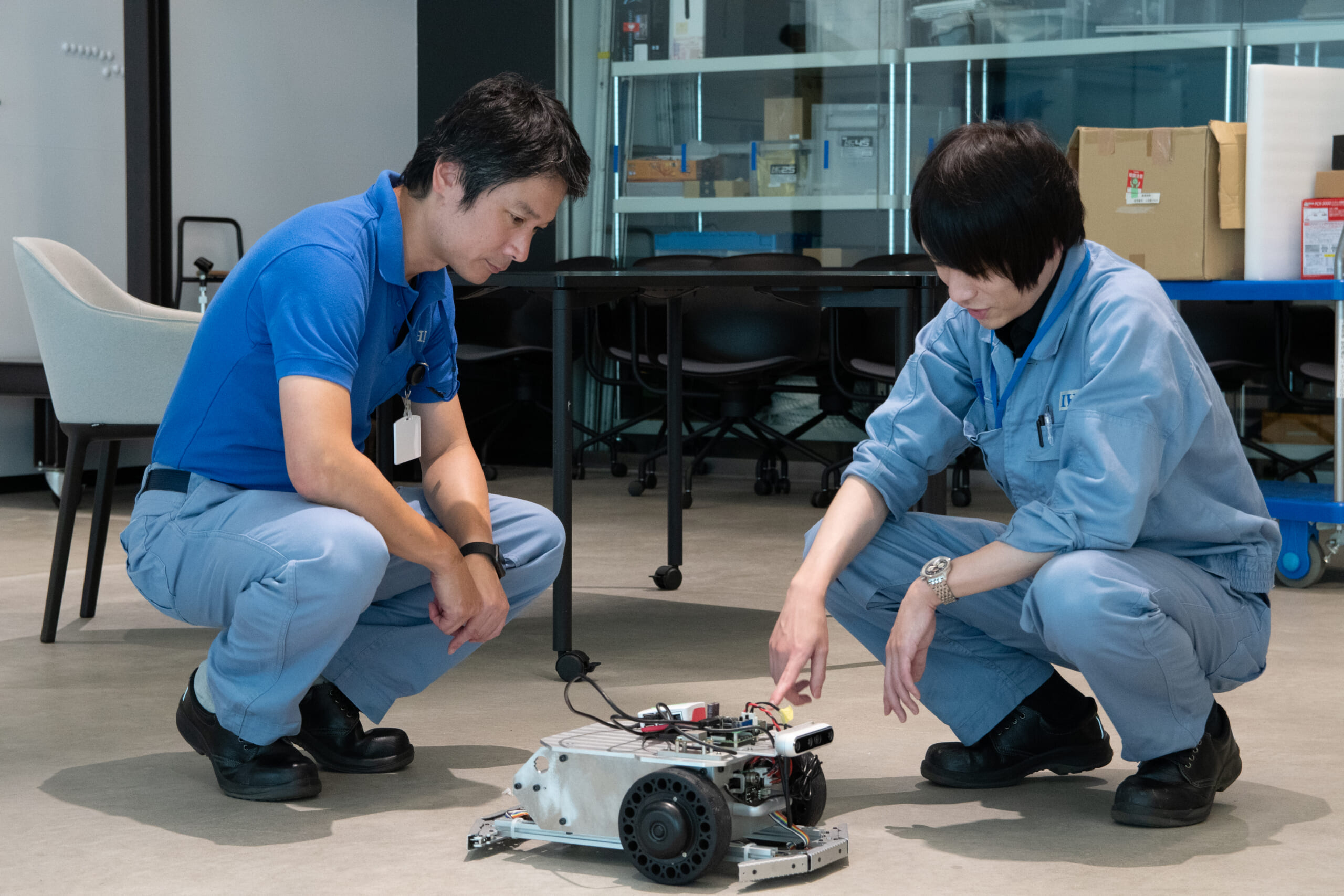
そして3つ目が、今回焦点を当てる「人協働AMR」。人との協働に向け、安全性を確保し、低コストで運用できる物流ロボットのリアルタイム群制御技術の開発に取り組む前田宗彦さん、鳩康彦さんに話を聞きました。
キーワードとなっている「人協働」について、前田さんはまずこう語ります。「全部自動化してしまえば人もいなくなるので必要ないかもしれませんが、人が100%いなくなるのは現実的には難しい。仮に完全自動システムでも、トラブルが起きた場合には人がメンテナンスに入る必要があり、人協働が前提になければ安全確保のためにそのたびシステムを止めなくてはいけません」

また別の観点から、「すでに運用されている物流の現場を全自動システムにリプレースするには、ものすごい投資が必要になります。最低限の投資で、数台のロボットを入れて少しずつ省人化を図っていくというニーズがあるのではないかと考えました」とも。
人協働AMRの現状は、AMRがゆっくりと動作することで安全を確保しているため、作業効率に課題があります。「お客さまからすると、AMRにもっと速く動いてほしいという不満があり、そこを解決していこうというものです」
AMRが、倉庫で働く人や他のAMR、パレットやラックなどの障害物をよけて、目的の地点まで最短距離で安全に、かつ、できるだけ短時間で荷物を運ぶ。それを可能とするための研究開発を始めて2年がたち、いくつかの技術的な課題が見えてきました。

具体的な内容は明かせませんが、そうした課題の一つの要因が「ロボットは自分がどこにいるか正確には分からないこと」だと鳩さんは説明します。

今回の開発では、LiDAR(ライダー)と呼ばれる3次元計測センサーで人や障害物の位置を測定・把握してクラウドコンピューターに送り、それを基にクラウドコンピューターがAMRに無線で指示を出す方式を取っています。AMRはそれを受けて移動しながら、自分がどこにいるかという「自己推定位置」の情報を返します。これにずれが生じるといいます。
「例えばタイヤが1周回ったら何メートル進むという設計になっていても、ほんのちょっとしたスリップが蓄積されて計算と実際の位置が異なってきます」と前田さんは説明。AMR自身にLiDARを持たせることで正確な位置を割り出す方法もありますが、「一台一台にLiDARを載せるとコストが膨らむので、今目指している方向性とは異なります」と鳩さん。

さらに実際の現場にはさまざまな遮蔽(しゃへい)物があって見通しの悪い場所もあるほか、倉庫の窓から西日が差すと影ができてセンサーが反応しない、といった現象も「あるある」だといいます。「その信頼性、可用性の部分ですね。実験場では動いても、現場になると想定外のパターンで動かなくなることがよくあるので、意地悪試験のようなことをどんどんしていく必要があります」(前田さん)
現場からそんなフィードバックが返ってきた時に思うのは、「だよなー、ですよ」と笑う前田さん。「ユースケースはもちろん検討しますが、研究者が想定する環境と実際の現場の環境は往々にしてびっくりするほど違っているので、よくあることです」。鳩さんも「それがない開発はないと思っているので、当たり前だと考えて対応しています」と淡々とした表情を浮かべます。

いくつもの想定外のパターンや数々の失敗ケースを経ながら、どんな条件でも障害物をよけて安全に目標地点まで荷物を運んでくれる、人協働AMR開発のゴールを目指しています。苦労は尽きませんが、どのようなモチベーションで2人は向き合っているのでしょうか。
「自分で設計したり、プログラムを書いたりしたものが動いてくれるとかわいいものです」と前田さん。「さかのぼれば工業高専にいた時から、ロボットにセンサーや制御装置を載せてプログラミングして動かすということをかれこれ30年近くしていますが、いまだに動いてくれると面白いし、想定通り動かなくても、それはそれで面白い。なかなか難しくて、だから面白いなあと」
「作って動いた、というのはエンジニアとしての楽しみですよね」とうなずく鳩さん。そして、「作った、完成した、良かったな、で終わりではなく、できたものをたくさん使ってもらいたいという気持ちも今は強いです」とも。

前田さんも「開発がうまくいった暁には、自分たちの作ったものが自分たちの知らない所で日夜動いていると想像するのは楽しいことです」と言います。「トラブルがあった時は連絡が来て対応に迫られますが、うまく動いているという報告はほとんど来ないので、便りのないのは良い知らせというか。考えてみればIHIの製品はそういうものが多いですね」と頬を緩めます。
人協働AMRは将来的には倉庫内に限らず工場の敷地内や港湾など、屋外の物流現場での運用も見据えています。自分たちの研究開発がそうした現場で社会課題を解決していくことについて、意外にも2人は直接的には意識していないそう。

鳩さんは「多くの人に使ってほしいと先ほど言いましたが、それが結果的に、社会の課題を解決していることになるのかもしれませんね」と自分で納得した様子。
それを受けて、前田さんはファミリーレストランに導入され始めている猫型の配膳ロボットを例に挙げます。「あの猫ちゃんが現場に入ってくることによって、そこで働く人たちが『すごく仕事が楽になったね』『手いっぱいだったから助かるね』と言って、子どもたちもきゃっきゃきゃっきゃと喜んでいる。理想的ですよね」
「ロボットによる省人化、無人化という話になると、人の仕事を奪うなんていうことも言われがちですが、むしろ現場の人たちに愛される存在になっていけば」とも。「このロボットの顔にはカメラが付いていて、動くためにはそのセンサーが大事なんだよと話すと、一緒に働いている人がロボットの顔を拭いてあげるような、『仕事仲間』として愛されるものになれば」と目を細めます。
現場の課題を解決できたらという思いと、エンジニアとしての楽しみ、喜びを持って開発に取り組む2人。ついに送り出したものが社会に実装された時、おのずと社会課題の解決につながり、人とロボットが協働する未来の一片を描き出していくことでしょう。

取材協力:
前田 宗彦|技術開発本部 技術基盤センター 制御・センシング技術部
鳩 康彦|同上